

.jpeg)

Current drone swarm optimization methods struggle to efficiently coordinate large fleets of autonomous drones for mission-critical applications like disaster response, precision logistics, and surveillance for Aerospace & Defence industries, highlighting the need for advanced drone swarm optimization using QIO.
Existing classical algorithms face scalability limits, slow convergence, and poor adaptability in dynamic environments, leading to suboptimal resource use, delayed decisions, and operational failures.
This inefficiency hinders the transformative potential of drone swarms in high- stakes scenarios where speed, precision, and real-time adaptability are non- negotiable.
Drone Swarm Optimization is Mission-Critical
Drone swarms are force multipliers in quantum optimization for defense aerospace applications, enabling surveillance, precision strikes, and electronic warfare at scale. However, failure to optimize their operations leads to
-Operational Delays & Mission Failure
Inefficient task assignment and energy waste slash mission durations by 30-50%, crippling time-sensitive operations like hostage rescues or border surveillance. Effective UAV mission optimization is essential to prevent these costly operational setbacks.
-Prevent Collisions & Hardware Loss
Suboptimal path planning in cluttered environments (e.g., urban combat zones) risks mid-air collisions, destroying multi-million-dollar assets and compromising objectives. Smarter paths and safer missions through real-time trajectory optimization directly address these risks at the path-planning level. Enhanced drone swarm path planning algorithms are essential for preventing these costly operational failures.
-Communication Blackouts in Adversarial Zones
Fragile networks collapse under high node density, causing coordination breakdowns in GPS-denied areas—leaving swarms blind to threats like enemy jamming or terrain shifts. These coordination failures also cascade into broader defense logistics optimization challenges across multi-domain operations.
-Strategic Vulnerability to Dynamic Threats
Brittle swarms freeze in unpredictable environments (sudden storms, moving targets), enabling adversaries to exploit delayed reactions or failed missions.
-Overcome Combinatorial Gridlock at Scale
Classical methods fail for swarms with a very high number of drones, stalling real-time decisions, which is why real-time drone swarm defense optimization through quantum-inspired algorithms addresses these computational bottlenecks for large-scale operations. For a broader view of where classical solvers hit their limits, see our breakdown of complex optimization use cases.
Quantum Algorithm for Drone Swarm Optimization
BQP's quantum inspired optimization for mission planning in defense applications leverages principles from quantum computing to solve swarm coordination challenges 10-100x faster than classical methods, on classical hardware. BQP’s solution enables:
- Scalable coordination of 100+ drones in real time,
- Dynamic adaptability to shifting environments (e.g., weather, obstacles),
- 20-40% cost reduction via optimized energy use and resource allocation — gains that mirror results seen in military fleet optimization programs where coordinated asset management drives operational savings
This breakthrough bridges the gap between theoretical quantum advantages and practical, deployable solutions—without requiring quantum hardware. The result is a foundation for adaptive UAV swarm strategies that can respond dynamically to evolving operational requirements.
QIO vs. Genetic Algorithms: Why choose BQP
How BQP’s platform BQhy leverages QIO to Transforms Drone Swarm Operations
Quantum-Inspired Search Mechanisms
Evaluates multiple solutions simultaneously, enabling rapid exploration of vast search spaces.
Real-Time Placement Optimization for Combat Scenarios
Real-Time Placement Optimization for Combat Scenarios Optimizes swarm configurations for sudden threats (e.g., enemy jamming, weather shifts), enabling mission-critical responsiveness. This builds on the same foundations as quantum inspired trajectory optimization, where real-time path recalculation is critical under adversarial conditions. These principles extend beyond terrestrial applications to adaptive drone defense systems and orbital contexts where similar optimization challenges exist.
Load Optimization for Energy-Efficiency
Balances battery usage across swarms via quantum-optimized load distribution, extending mission durations for prolonged surveillance.
Multi-Objective Optimization
Generates better solutions (e.g., balancing payload design optimization in aerospace, energy, and trajectory) for complex missions like urban search-and-destroy operations.
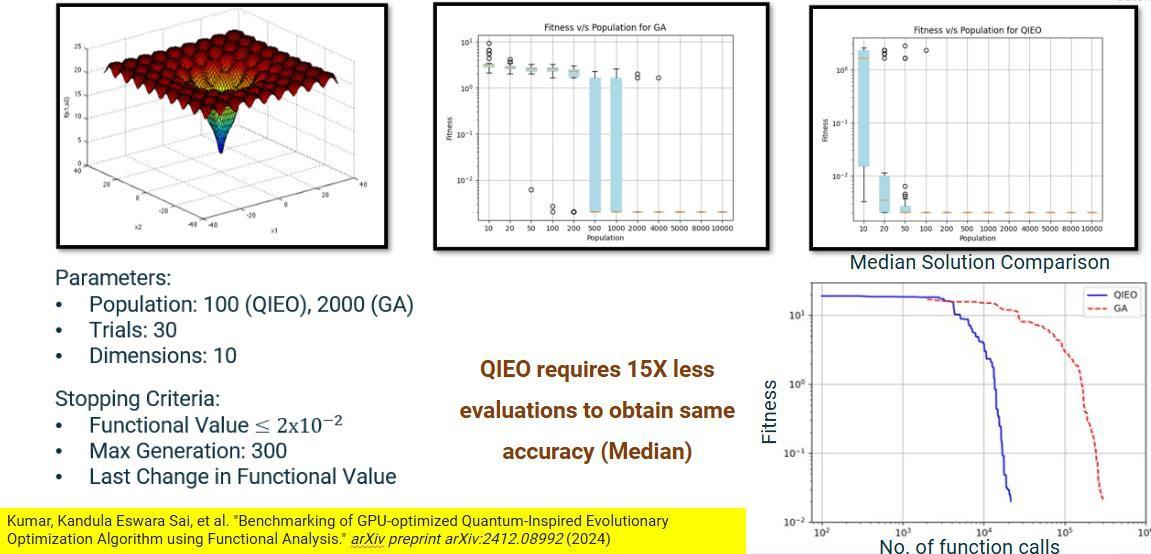
Benchmarking QIO on Ackley Function
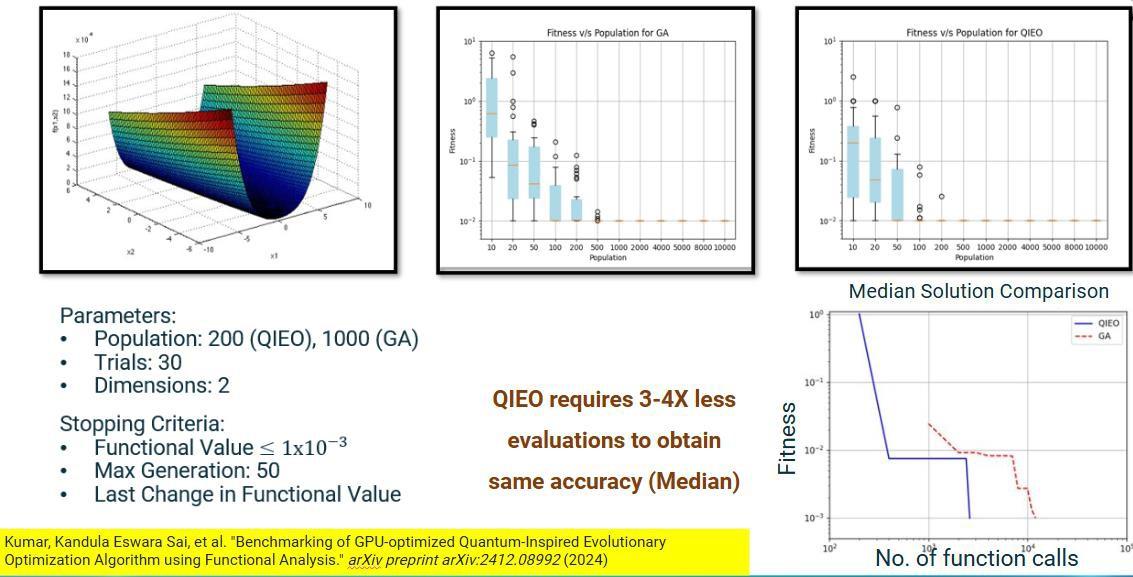
Benchmarking QIO on Rosenbrok Function
BQP’s Approach to Solving the Drone Swarm Problem
Problem Formulation:
Mathematically formulate the drone swarm optimization problem, e.g., the objective function (e.g., mission time and energy consumption) and the constraints e.g., collision avoidance and communication range.
Algorithm Implementation
Map the optimization problem as specified to a static and dynamic scheduling problem
Parameter Tuning
Tweak the algorithm parameters for maximum performance under given swarm configurations and mission requirements.
Simulation and Validation
Simulate the optimized drone swarm behaviour under realistic drone dynamics and environmental models.
Comparative Analysis
Compare BQP’s performance with traditional optimization methods, such as genetic algorithms, in terms of solution quality, convergence rate, and scalability.
Reporting
Document the methodology, results, and findings.
Expected Outcomes
Superior Swarm Performance
Demonstrable improvement in optimization compared to traditional optimization methods (e.g., genetic algorithms).
Operational Efficiency & Productivity
Enhanced swarm productivity through optimized task allocation, path planning, and real-time decision-making—critical for high-stakes defense and surveillance missions.
Energy & Time Savings
Reduction in energy consumption and mission completion times enabling prolonged operations in contested environments.
Scalable Real-World Deployment
A robust, hardware-agnostic solution validated for practical applications (e.g., border patrol, disaster response) with swarms of 10+ drones with multiple objectives and constraints, enabled by adaptive UAV swarm strategies.
BQP's Quantum Optimization solution and quantum-inspired optimization is poised to redefine autonomous drone swarm capabilities, addressing critical gaps in speed, scalability, and adaptability. To understand the broader landscape of quantum optimization in aerospace defense, explore how these methods are reshaping mission architecture across domains. It delivers
- A quantum leap in swarm performance, setting new benchmarks for mission success rates.
- A scalable blueprint for next-gen autonomous systems aerospace and defence applications.
.png)
.png)


.svg)
.svg)
.svg)
.svg)