



The rapid evolution of UAV capabilities and the proliferation of multi-vehicle missions across inspection, delivery, and surveillance applications have created unprecedented demands for scalable, real-time task allocation frameworks. These frameworks must navigate complex operational constraints while maintaining mission effectiveness.
Modern cooperative UAV operations face the challenge of balancing competing objectives, minimizing mission time and energy consumption while maximizing coverage and reliability all within regulatory frameworks that impose strict safety and communication requirements. Traditional allocation methods often struggle to meet these demands efficiently.
Why UAV Task Allocation Matters Now
The transformation of UAVs from single-platform tools to coordinated fleet assets has fundamentally changed mission planning. Multi-UAV operations now require sophisticated allocation frameworks capable of handling dynamic environments, resource constraints, and real-time replanning demands.
Regulatory requirements for beyond-visual-line-of-sight operations, combined with communication limitations and airspace complexity, create optimization challenges that exceed the capabilities of traditional scheduling methods. These challenges demand algorithmic approaches that provide both scalability and operational reliability.
Problem Definition & Key Objectives
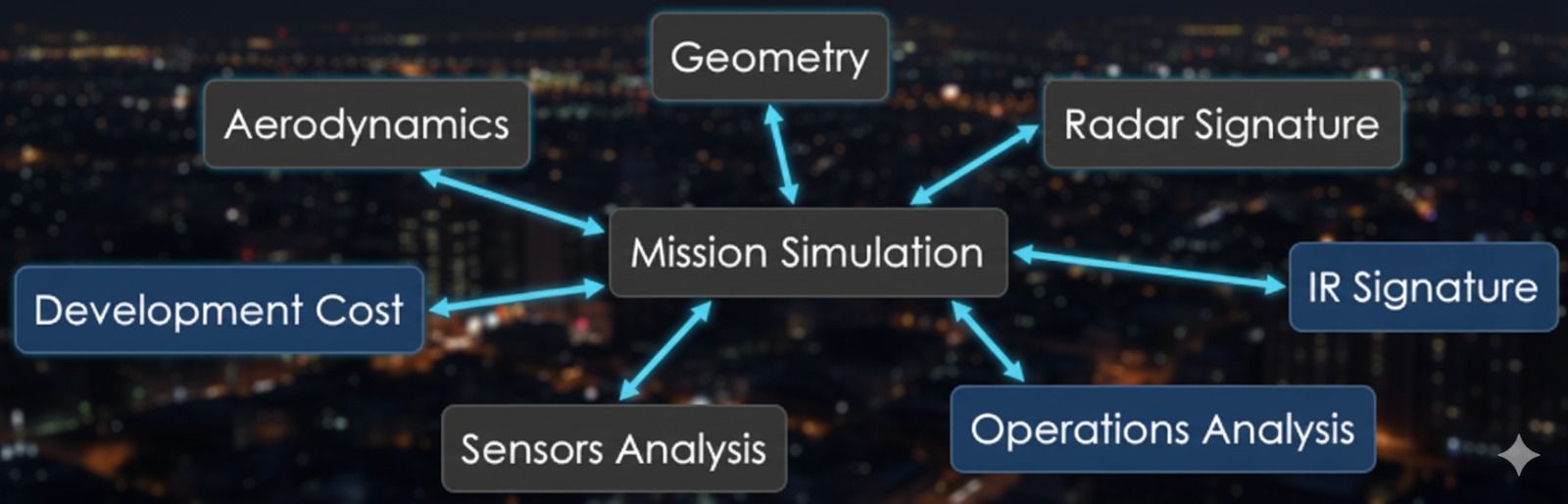
Multi-UAV task allocation involves assigning a set of tasks TTT to a fleet VVV of UAVs with heterogeneous capabilities and operational constraints. The goal is to optimize multiple competing objectives while ensuring that solutions remain feasible under dynamic operational conditions.
As fleet size and task diversity grow, the mathematical complexity increases exponentially, creating optimization challenges that require careful balancing of solution quality and computational tractability.
Typical Objectives
Mission planners aim to minimize total mission completion time, energy consumption, and response latency for critical tasks while maximizing geographic coverage, mission reliability, and resource utilization efficiency. When these goals conflict, multi-objective formulations are necessary.
Pareto-optimal solutions allow planners to evaluate trade-offs and make informed decisions based on mission priorities and operational context.
Common Constraints
Task allocation must respect payload and capability requirements, battery life and endurance limitations, temporal windows for time-sensitive operations, no-fly zones, regulatory restrictions, communication connectivity requirements, and collision avoidance constraints to ensure safe operations.
These constraints interact in complex ways, creating challenges that simple or naive allocation algorithms often cannot handle effectively.
Architectural Patterns for UAV Task Allocation
The choice of architecture centralized, decentralized, or hybrid fundamentally shapes system performance. Trade-offs include solution optimality, computational scalability, fault tolerance, and communication requirements. Selecting the right approach depends on mission profiles and operational constraints.
Centralized Architectures
Centralized systems, usually implemented on ground control stations or cloud infrastructure, compute globally optimal task assignments using mixed-integer linear programming or nonlinear optimization. These systems excel at producing high-quality solutions and maintaining global coordination.
However, they face single points of failure, communication latency, and scalability limits, which can be prohibitive for large fleets or time-critical operations requiring rapid replanning.
Distributed / Decentralized Architectures
Decentralized approaches enable UAVs to negotiate task assignments onboard through peer-to-peer communication, market mechanisms, or auction-based schemes. This distributes the computational load and eliminates central coordination bottlenecks.
These architectures scale naturally and offer resilience to communication failures but often produce suboptimal solutions due to limited global information. Communication overhead during negotiations can also become significant.
Hierarchical & Hybrid Architectures
Hybrid frameworks combine strategic global planning for baseline task distribution with tactical local replanning. This allows UAVs to handle dynamic events or unexpected changes without recomputing the full mission.
Hybrid architectures are particularly effective for large fleets operating in dynamic environments, where balancing global coordination with local autonomy and real-time responsiveness is critical.
Algorithmic Families & Trade-offs
Selecting the right algorithm for UAV task allocation requires balancing computational complexity, latency sensitivity, mission duration, repeatability, and the trade-offs between solution quality and tractability. Different methods suit different operational scenarios:
Exact & Optimization-Based Methods (MILP, MINLP, NLP)
Mathematical programming approaches provide theoretical optimality guarantees using branch-and-bound, cutting planes, and constraint propagation. These methods are ideal for small fleets or offline planning where computation time is available. However, they struggle with large-scale problems or real-time requirements due to combinatorial explosions.
Heuristic & Metaheuristic Methods
Techniques such as greedy randomized adaptive search, genetic algorithms, tabu search, and simulated annealing offer flexible ways to handle complex, nonconvex cost functions and constraints. They scale reasonably to moderate fleet sizes and support arbitrary objectives but sacrifice optimality guarantees and often require extensive parameter tuning.
Auction & Market-Based Mechanisms
Distributed bidding protocols allow UAVs to quickly allocate tasks based on local cost estimates. Conflict resolution can use consensus algorithms like the Consensus-Based Bundle Algorithm (CBBA). These methods perform well in time-critical, low-bandwidth environments, encode task priorities naturally, and offer fault tolerance, but can converge to suboptimal solutions if local information is limited or bidding strategies are poorly designed.
Consensus & Distributed Optimization
Dual decomposition and ADMM frameworks divide complex problems into smaller subproblems solved independently, then coordinated via consensus. These methods combine centralized optimality with distributed scalability but require careful design to ensure convergence and may struggle with tightly coupled constraints.
Reinforcement Learning & Learning-Based Allocation
Neural network policies trained with reinforcement learning can adapt to dynamic environments and mission patterns. Imitation learning allows warm-starting from expert demonstrations. These methods excel in repeated scenarios and can discover non-intuitive strategies, but require significant training data, may struggle to generalize, and face certification challenges in safety-critical operations.
Multi-Objective & Pareto Methods
Methods like NSGA variants, weighted-sum approaches, and Pareto front exploration systematically handle conflicting objectives, such as mission time, energy, and coverage completeness. They provide rich trade-off analysis and support mission-specific preferences but need sophisticated visualization and decision-support tools to turn Pareto-optimal solutions into actionable plans.
Practical Considerations for Real Deployments
Transitioning from algorithmic research to real-world UAV deployments requires careful attention to hardware limitations, communication realities, and safety requirements factors that academic formulations often simplify or overlook.
Communication Constraints & Intermittent Links
Real-world UAV operations must handle high-latency, low-bandwidth communication links that are prone to interference, range limitations, and intermittent connectivity.
Effective allocation frameworks emphasize local autonomy and opportunistic synchronization, ensuring mission progress even during communication blackouts. Robust protocols are essential for managing delayed or corrupted messages, which could otherwise compromise coordination.
Battery & Endurance Modeling
Energy-aware allocation algorithms must integrate realistic battery consumption models, accounting for flight dynamics, payload operations, communication energy, and environmental factors like wind and temperature.
Conservative return margin planning prevents mission aborts due to energy depletion while allowing dynamic reallocation of energy budgets when missions finish early or conditions are favorable.
Safety, Collision Avoidance & Airspace Rules
Integrated path planning and task allocation ensure missions remain feasible under collision avoidance constraints and dynamically changing airspace regulations.
Safety-critical systems should employ formal verification to guarantee constraint satisfaction, even in worst-case scenarios or equipment failures.
Heterogeneous Fleets & Capability Matching
Task compatibility matrices and capability-based allocation ensure that UAV sensor payloads, flight characteristics, and operational ranges align with mission requirements.
Effective frameworks account for degraded performance modes and partial capability scenarios, enabling graceful degradation when preferred platforms become unavailable due to maintenance or failure.
Case Studies & Use Cases
Real-world deployment scenarios demonstrate how algorithm selection and architectural choices must align with mission characteristics and operational constraints to achieve successful outcomes.
Infrastructure Inspection (powerlines, pipelines)
Linear infrastructure missions benefit from clustered task allocation that minimizes transit time between inspection points while accounting for energy constraints that limit operational range from charging stations. Repeated corridor patterns enable learning-based approaches to optimize inspection sequences and identify optimal staging locations for multi-leg missions requiring battery swaps or recharging stops.
Urban Delivery
Dense urban environments with strict time windows and high-priority packages require hybrid centralized planning for route optimization combined with tactical replanning capabilities that can handle traffic delays, no-fly zone changes, and urgent priority insertions. Communication-intensive coordination protocols ensure package delivery precedence while maintaining safe separation in congested airspace.
Surveillance & Search & Rescue
Dynamic target scenarios with evolving priority levels demand distributed auction mechanisms that enable rapid task reallocation without central coordination bottlenecks that could delay critical response times. Decentralized approaches prove essential when communication infrastructure is compromised during disaster scenarios or adversarial environments where centralized coordination creates vulnerability.
How BQP Speeds Development & Deployment for UAV Task Allocation
BQP's quantum-inspired optimization platform overcomes the computational and real-time performance limitations of traditional UAV task allocation methods. It enables rapid development and deployment of sophisticated coordination frameworks that scale seamlessly—from small research fleets to fully operational multi-UAV systems.
Key UAV Task Allocation Capabilities:
- Hybrid optimization engine: Combines quantum-enhanced global MILP/NLP solvers for strategic planning with surrogate-assisted metaheuristics for scalable real-time replanning, achieving up to 20× faster convergence than classical methods while maintaining solution quality.
- Scenario templates & rapid prototyping: Pre-configured mission frameworks for infrastructure inspection, delivery operations, and search & rescue scenarios incorporate domain expertise and regulatory constraints, enabling fast algorithm tuning and deployment validation.
- Distributed simulation & hardware-in-the-loop: Provides realistic testing environments to validate allocation algorithms under communication constraints, hardware limitations, and failure scenarios before operational deployment.
- Pareto exploration & trade-off dashboards: Interactive visualization tools allow comparison of energy consumption, latency, and coverage completeness, with export-ready allocation plans compatible with existing ground control systems.
- Integration APIs: Standardized interfaces for on-board agent communication, ground control system integration, and comprehensive logging support audit requirements and post-mission analysis.
A recent pilot program with a logistics company demonstrated a 75% reduction in reallocation latency and a 28% improvement in mission completion rates, thanks to quantum-enhanced consensus algorithms that maintained coordination effectiveness even under intermittent communication conditions.
Experience firsthand how BQP’s quantum-inspired platform accelerates UAV task allocation, improves mission efficiency, and ensures seamless real-time coordination—start your 30-day free trial today.
Best Practices & Design Patterns
Successful UAV task allocation deployment requires systematic attention to operational realities and failure modes that pure algorithmic approaches often overlook or underestimate.
Precompute task bundles and standard allocation patterns for frequently encountered mission types while reserving local autonomy capabilities for tactical modifications that handle unexpected events or priority changes. Use auction-based schemes when communication connectivity is intermittent or unreliable, but leverage centralized reoptimization capabilities when full network connectivity enables global coordination benefits.
Integrate comprehensive energy consumption models with conservative return margin planning that accounts for worst-case weather conditions and equipment degradation scenarios. Validate all allocation algorithms through hardware-in-the-loop testing and stochastic scenario evaluation that encompasses communication failures, equipment malfunctions, and adverse environmental conditions before operational deployment.
Open Challenges & Research Directions
The field of multi-UAV task allocation continues to evolve toward more sophisticated coordination capabilities, addressing increasingly complex operational scenarios while ensuring safety and certification compliance. Key research and operational challenges include:
- Scaling to large fleets: Coordinating hundreds or thousands of UAVs while maintaining safety guarantees demands breakthrough algorithms and distributed computing architectures capable of handling complex interactions in real time.
- Safe AI-driven allocation: Development of certifiable reinforcement learning policies and safe learning approaches is critical for deploying AI-driven task allocation in safety-critical environments.
- Multi-operator airspace coordination: Cooperative allocation across multiple operators introduces regulatory and technical challenges that require new frameworks for inter-organizational coordination and conflict resolution.
- Handling computational complexity: Quantum-inspired optimization solvers and surrogate-assisted many-objective allocation methods offer promising approaches for managing the exponential growth in problem complexity in large-scale, multi-stakeholder missions.
Conclusion — Choosing the Right Allocation Architecture
The selection of appropriate task allocation frameworks must balance algorithmic sophistication against operational constraints and deployment realities, with successful implementations requiring careful attention to communication limitations, safety requirements, and scalability demands that extend beyond pure optimization performance.
BQP's integrated development and deployment platform enables rapid transition from algorithmic research to operational capability through quantum-enhanced optimization, comprehensive simulation environments, and industry-specific templates that accelerate time-to-deployment while maintaining the flexibility required for diverse mission scenarios.
Book a demo to see BQP's UAV task allocation workflows and discover how quantum-powered optimization can transform your multi-UAV coordination capabilities.
FAQs
Which allocation method suits limited-communication environments?
Distributed auction mechanisms like CBBA (Consensus-Based Bundle Algorithm) perform well under communication constraints, enabling local decision-making with periodic consensus updates when connectivity permits, while maintaining mission progress during communication blackouts.
Can BQP support real-time reallocation for urgent tasks?
Yes, BQP's quantum-enhanced optimization algorithms can evaluate allocation modifications and generate updated mission plans within seconds for typical fleet scenarios, enabling rapid response to priority task insertions while minimizing disruption to ongoing operations.
How do you model heterogeneous UAV capabilities?
BQP uses capability matrices that map sensor payloads, flight performance characteristics, and operational ranges to task requirements, with support for degraded performance modes and dynamic capability updates based on equipment status and environmental conditions.
What safety/certification considerations apply to learning-based allocation?
Learning-based allocation systems require formal verification of safety constraints, explainable decision-making processes, and comprehensive testing across diverse scenarios to demonstrate reliability bounds, with hybrid approaches often combining learned policies with verified safety controllers for certification compliance.
.png)
.png)


.svg)
.svg)
.svg)
.svg)