


Satellite constellations have been operating since the early 1960s, beginning with pioneering missions that demonstrated coordinated operations in orbit. Over the decades, constellations have evolved from a handful of large satellites into expansive, distributed systems composed of dozens or even hundreds of small spacecrafts. Modern Earth observation and geospatial intelligence missions increasingly depend on these coordinated networks to deliver high-resolution, continuous global coverage.
While the physical size and cost of individual satellites have decreased, the scale and sophistication of constellation operations have grown dramatically. This growth introduces new layers of complexity, particularly in operational planning, where coordination between multiple spacecraft must account for spatial dependencies, time windows, communication constraints, and finite onboard resources.
As new mega-constellations are deployed, mission success depends not only on engineering precision but also on the ability to autonomously orchestrate tasks across many satellites in real time.
Constellation Planning Problem
In the context of Earth imaging and geospatial intelligence (GEOINT) missions, constellation planning is fundamentally an assignment and scheduling problem. The challenge lies in optimally assigning imaging and data downlink tasks to multiple satellite agents under strict operational constraints.
This planning framework can be categorized using the task-agent taxonomy. It classifies problems along three axes:
- Number of tasks per agent — single-task (ST) or multi-task (MT).
- Number of agents per task — single-robot (SR) or multi-robot (MR).
- Time of allocation — instantaneous allocation (IA) or time-extended allocation (TA).
The constellation scheduling problem for GEOINT falls into the [ST-SR-TA] category, where each satellite performs one task at a time (ST), each task requires one satellite (SR), and task allocation is planned over extended time horizons (TA).
However, the extended version of this classification includes dependencies that exist between tasks and agents:
- No Dependency (ND): Tasks are independent.
- In-schedule Dependency (ID): Task timing affects other scheduling opportunities.
- Cross-schedule Dependency (XD): Agents must coordinate directly for fulfillment.
- Complex Dependency (CD): Task utility depends on the global scheduling context.
Constellation scheduling, where imaging and downlink opportunities are interdependent, belongs to the ID[ST-SR-TA] class — a category that remains strongly NP-hard, meaning enumerative or brute-force solutions are computationally infeasible.
Why the Problem is Computationally Complex
The constellation planning process must jointly optimize imaging, data downlinks, and spacecraft health management across multiple satellites. Each satellite operates under spatial constraints (its orbit and field of view), temporal constraints (visibility windows), and physical constraints (power, memory, and slew rate).
In practical terms, this means:
- Each satellite can perform only one task (imaging or downlink) at a time.
- Ground stations can connect to only one satellite per window.
- Memory capacity limits how many images can be stored before downlinking.
- Slew agility defines how quickly satellites can repoint to new targets.
- Regular health checks require periodic ground communication.
These interrelated constraints create cross-coupled dependencies between imaging and downlink phases. Capturing too many images fills memory; prioritizing downlink too early wastes observation potential. Achieving the right balance requires highly efficient scheduling methods that evaluate millions of possible configurations under tight operational timelines.
Coupled Imaging–Downlink Challenge
In current operational practice, many mission planners treat image acquisition and data downlinks as separate scheduling tasks. However, this decoupling leads to inefficiencies. The two phases are inherently dependent: data must be collected before it can be transmitted, and transmission opportunities depend on orbital geometry and available antenna access.
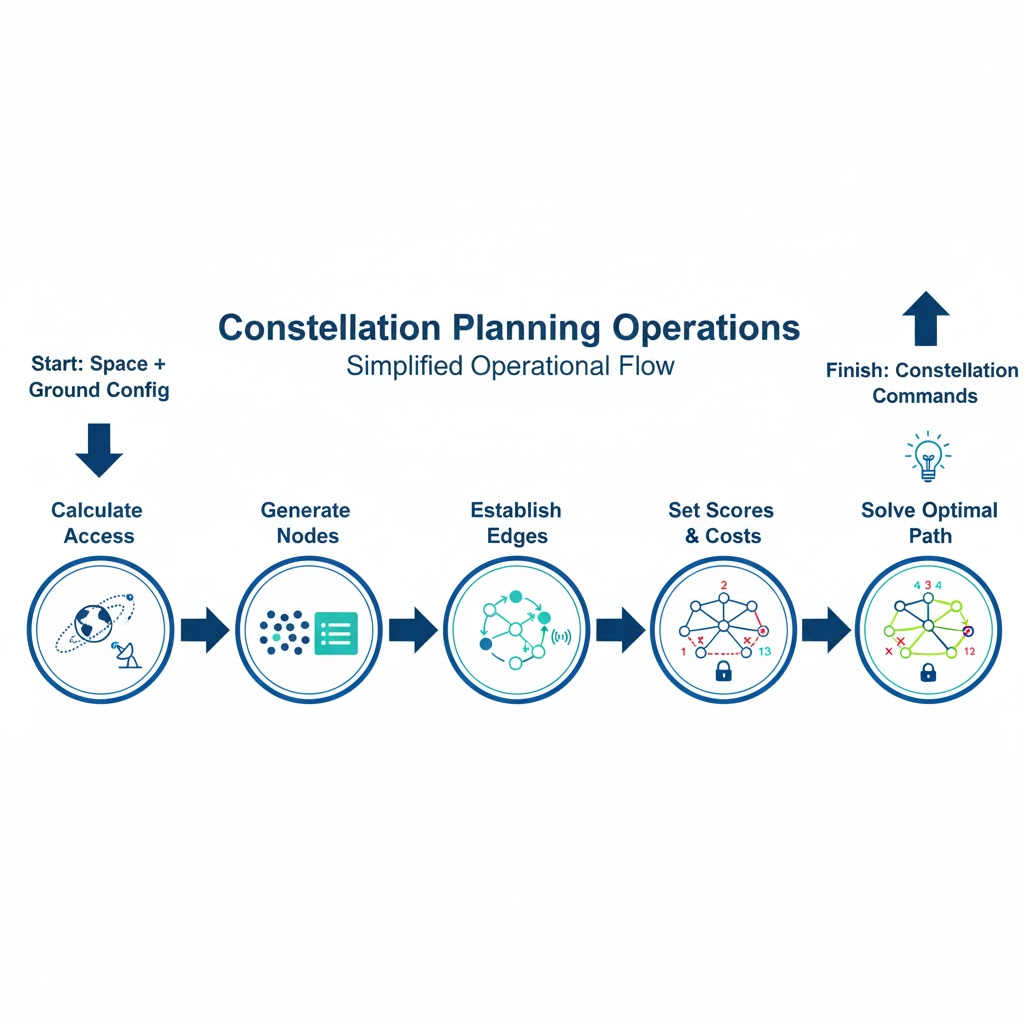
The Design Reference Mission (DRM) for GEOINT must integrate both tasks into a single coupled optimization framework. The solution begins by discretizing imaging and downlink opportunity windows into manageable time segments. Each discrete time point represents a node in a planning graph, and feasible transitions — limited by slew rates and timing — form the edges.
Each edge is assigned a utility value, reflecting the benefit of executing a given task or transition (e.g., imaging priority, downlink value) and its associated cost (e.g., energy, slew effort). The objective is to find the optimal path through this graph — the set of tasks and transitions that maximize total mission utility under all operational constraints.
To make the problem tractable, the discretized approach allows for Mixed Integer Linear Programming (MILP) formulations, enabling numerical optimization over large but finite solution spaces.
Constraints in Real Mission Scenarios
A realistic constellation plan must respect both physical and operational constraints, such as:
- Temporal constraints: Tasks can only occur within defined visibility windows.
- Spatial constraints: Each satellite’s view geometry (elevation and azimuth) must ensure line-of-sight access to targets and ground stations.
- Lighting constraints: Imaging tasks may require specific solar angles for quality data.
- Resource constraints: Onboard memory, power levels, and data rates limit concurrent operations.
- Communication constraints: Ground stations must be deconflicted; only one satellite can downlink at a time.
These multi-dimensional constraints transform constellation scheduling into a multi-objective combinatorial optimization problem, demanding advanced algorithmic strategies and scalable computational frameworks.
Limitations of Classical Optimization
Classical methods, including exact algorithms and classical heuristic searches, have achieved partial success in single- or small-satellite contexts. However, as constellations expand into hundreds of active assets, these methods encounter severe computational bottlenecks.
MILP models can produce optimal schedules but require extensive run time, making them unsuitable for dynamic environments where conditions and priorities change hourly. Heuristic methods, though faster, often yield sub-optimal solutions, compromising coverage or data throughput.
Furthermore, existing algorithms struggle to handle in-schedule dependencies, where one satellite’s imaging plan affects another’s downlink availability or orbital overlap. This lack of real-time adaptability underscores the need for new approaches that combine speed, scalability, and intelligent adaptability.
Why Quantum-Accelerated Optimization is Emerging
Quantum-accelerated and quantum-inspired optimization frameworks offer a paradigm shift, forming a practical Quantum Optimization solution for complex constellation planning. Instead of searching for a single best schedule sequentially, they evaluate multiple possible solutions in parallel using probabilistic search dynamics inspired by quantum principles.
In constellation planning, such algorithms can:
- Rapidly balance conflicting objectives (imaging vs. downlink).
- Dynamically reallocate tasks as orbits evolve, or failures occur.
- Scale efficiently to hundreds of satellites and thousands of time windows.
By simulating quantum superposition and amplitude evolution on classical or hybrid systems, quantum-inspired solvers can escape local optima — a major weakness of traditional heuristics, while maintaining real-time responsiveness required for operational mission updates.
The future of constellation planning lies in autonomous scheduling ecosystems, where artificial intelligence, hybrid optimization, and digital twins work in concert. In a digital twin of the constellation, a high-fidelity virtual model can simulate orbital mechanics, data flow, and power consumption, enabling predictive scheduling and preemptive conflict resolution.
When integrated with quantum-accelerated optimization engines, such systems can perform continuous re-planning, allowing constellations to self-organize, adapt, and optimize under changing mission objectives or space weather conditions.
This evolution marks the transition from static, ground-controlled scheduling to autonomous, resilient, and intelligent mission orchestration, an essential leap for next-generation space operations.
FAQ'S
1. What is constellation planning in satellite operations?
Constellation planning is the process of designing, scheduling, and coordinating multiple satellites to work together efficiently for coverage, communication, or observation missions.
2. Why is coordination important in multi-satellite missions?
Coordination ensures satellites avoid overlap, maintain coverage balance, and optimize shared resources like power, bandwidth, and ground station access.
3. How does optimization improve constellation performance?
Optimization algorithms balance orbital positions, timing, and communication links—reducing latency, maximizing coverage, and improving mission reliability.
4. What challenges do engineers face in constellation planning?
Key challenges include orbital congestion, dynamic task allocation, limited onboard resources, and adapting to unpredictable environmental factors or failures.
5. How can quantum or AI-driven tools enhance constellation management?
AI and quantum-inspired optimization can simulate and re-plan satellite constellations in real time, helping operators adapt faster to mission and environment changes.
.png)
.png)


.svg)
.svg)
.svg)
.svg)