


A hypersonic vehicle flying at Mach 8 generates surface temperatures exceeding 2,000°C while simultaneously demanding aerodynamic efficiency, structural integrity, propulsion integration, and trajectory precision all in a design space where improving one discipline measurably degrades another. The engineering problem is not any single physics domain. It is the simultaneous coupling of aerodynamics, aerothermodynamics, structural mechanics, propulsion, and trajectory disciplines that interact non-linearly and cannot be optimized sequentially without producing designs that fail the disciplines you optimized last.
Classical MDO workflows handle this by running disciplines in decoupled loops with simplified surrogate models. The result is designs that are locally optimal within each discipline and globally suboptimal across the system, a characteristic failure mode that hypersonic vehicle programs have paid for repeatedly in test failures, redesign cycles, and program delays.
Quantum-inspired optimization for aerospace and defence changes this equation by enabling true simultaneous multi-disciplinary optimization at the problem scales that hypersonic vehicle design actually requires.
This page covers:
- The constraint landscape that makes hypersonic vehicle optimization uniquely hard
- The optimization disciplines involved and where classical tools break down
- Where quantum-inspired methods deliver measurable advantage in the design cycle
- How BQP's platform applies to hypersonic MDO workflows today
Written from the perspective of simulation-driven, hybrid quantum-classical optimization applied to aerospace engineering programs where design cycle speed and solution quality are both operational constraints.
What Makes Hypersonic Vehicle Optimization Fundamentally Different
Hypersonic vehicle optimization is not a harder version of supersonic vehicle optimization. It is a qualitatively different problem because above Mach 5, the physics change in ways that break the independence assumptions that classical design optimization relies on.
Below Mach 5, aerodynamic shape, structural design, and thermal protection can be designed sequentially with manageable coupling errors. Above Mach 5, aerodynamic heating is so severe and so sensitive to shape that every geometric change simultaneously alters aerodynamic performance, structural thermal loading, material response, and propulsion inlet conditions. The disciplines are not loosely coupled. They are tightly, non-linearly coupled, and the coupling effects dominate the design.
Specific characteristics that make hypersonic MDO uniquely demanding:
Aerothermoelastic coupling: At Mach 6+, aerodynamic heating causes structural deformation, which alters the aerodynamic surface geometry, which changes the local heat flux distribution, which changes the deformation. This feedback loop cannot be handled by static structural analysis with applied thermal loads; it requires fully coupled fluid-thermal-structural simulation at every design evaluation point.
Airframe-propulsion integration: In scramjet-powered hypersonic vehicles, the forebody is the engine inlet. The aftbody is the nozzle. Aerodynamic shape optimization that treats the airframe and propulsion system as separate components produces designs where the optimal aerodynamic forebody produces an inlet flow field that the engine cannot operate in. The optimization must be simultaneous, not sequential.
Narrow feasibility corridors: The flight corridor for a hypersonic vehicle the altitude-velocity space within which the vehicle can operate is narrow and bounded by hard physical constraints: dynamic pressure limits, heat flux limits, structural load limits, engine operability limits. A design that is aerodynamically optimal at the centre of the corridor may be structurally infeasible at the edges. Optimization must account for the full trajectory, not a single design point.
Computational cost per evaluation: A single high-fidelity CFD evaluation for a hypersonic vehicle at one flight condition can take hours on a high-performance computing cluster. An MDO loop that requires thousands of such evaluations to converge which classical gradient-based methods do is not computationally feasible within a design program timeline. This is where design optimization in engineering at the hypersonic regime demands fundamentally different computational strategies.
Key Constraints in Hypersonic Vehicle Optimization
Understanding the constraint landscape is prerequisite to understanding which optimization methods are appropriate. In hypersonic design, constraints are not preferences; they are hard physical boundaries that produce mission failure or vehicle loss when violated.
These constraints bind simultaneously across the full trajectory not just at the design point. An optimization that produces a vehicle satisfying all constraints at Mach 8, 30km altitude may violate structural limits during the acceleration phase or thermal limits during the pull-up at trajectory end. The full flight envelope must be evaluated, not a single point.
The Five Optimization Disciplines in Hypersonic Vehicle Design
Aerodynamic Shape Optimization
The aerodynamic shape of a hypersonic vehicle determines lift-to-drag ratio, vehicle trim, inlet capture area, and critically the surface heat flux distribution that the thermal protection system must survive. Shape optimization at Mach 6–10 involves solving the coupled inviscid and viscous flow around a geometry that may have thousands of shape parameters, evaluating aerodynamic performance against metrics that include drag coefficient, lift-to-drag ratio, pitching moment, and surface heat flux simultaneously.
Recent research demonstrates 39.9% total drag reduction and 33.95% decrease in wall heat flux integral achievable through counterflow jet optimisation on hypersonic configurations results that only emerge when aerodynamic and thermal objectives are optimised simultaneously rather than sequentially. Classical gradient-based shape optimisation typically converges on local optima that improve the primary aerodynamic metric while degrading the thermal metric because the gradient path toward lower drag does not align with the gradient path toward lower heat flux. These are quantum optimization problems precisely because the solution space contains non-obvious configurations that only surface through global search.
Thermal Protection System (TPS) Optimisation
TPS design determines whether the vehicle structure survives the trajectory. The optimization problem: minimise TPS mass while maintaining surface temperatures within material limits across the full trajectory, accounting for spatially varying heat flux, transient thermal response, and the TPS material's own ablative or radiative behaviour.
The challenge: TPS mass directly affects vehicle mass fraction, which affects propulsion requirements, which affects trajectory, which changes the heat flux distribution that the TPS must handle. TPS optimization is not separable from trajectory optimization and propulsion design. Classical sequential approaches design TPS for the worst-case heat flux from a fixed trajectory, then close the trajectory with the TPS mass miss the configurations where a slightly different trajectory reduces peak heat flux enough to allow a significantly lighter TPS, improving overall vehicle performance by a margin that justifies the trajectory deviation.
Trajectory Optimisation
Hypersonic trajectory optimisation is a dynamic optimisation problem: finding the time-history of control inputs angle of attack, bank angle, throttle that maximises mission performance (range, payload delivery accuracy, time-of-flight) while keeping the vehicle within all physical and operational constraints at every point along the trajectory.
The coupling with vehicle design makes this hard: the optimal trajectory for one vehicle configuration is suboptimal or infeasible for a slightly different configuration. Simultaneous vehicle design and trajectory optimization co-design produces better solutions than sequential design-then-optimise approaches, but requires optimization methods capable of handling the combined design and trajectory variable space simultaneously. See the full scope of aerospace optimization techniques that apply to trajectory co-design problems.
Propulsion Integration Optimisation
For air-breathing hypersonic vehicles, the scramjet engine is geometrically integrated with the airframe. The forebody compression surface shapes the inlet flow. The aftbody expansion surface is the nozzle. Propulsion integration optimisation simultaneously targets:
- Inlet design: capturing sufficient air mass flow across the operating Mach range while maintaining attached shock systems and acceptable total pressure recovery
- Combustion efficiency: fuel-air mixing, heat release distribution, and combustion stability under varying inlet conditions
- Nozzle performance: thrust extraction from the hot exhaust against the aftbody aerodynamic drag
Each of these interacts with the aerodynamic shape. An inlet geometry that maximises mass flow capture increases forebody drag. A nozzle shape that maximises thrust expansion also increases base drag. The optimum is only findable when all interactions are modelled simultaneously which classical decoupled MDO approaches do not do.
Structural and Aeroelastic Optimisation
At hypersonic speeds, structural optimization must account for combined thermal and mechanical loading that does not exist at subsonic or supersonic speeds. Aerodynamic heating induces thermal stresses, thermal gradients cause differential expansion, and the resulting structural deformation changes the aerodynamic surface feeding back into the aerodynamic and thermal loading. Structural optimization that ignores this coupling produces designs that are weight-optimal in a static analysis and structurally marginal in flight.
Why Classical MDO Approaches Fail Hypersonic Programs
Classical MDO methodologies Multidisciplinary Feasibility, Collaborative Optimisation, Bi-Level Integrated System Synthesis were developed for design problems where the coupling between disciplines is manageable and the computational cost per evaluation is moderate. Neither condition holds for hypersonic vehicle design.
Sequential discipline optimisation produces local optima: an aerodynamically optimised shape that is thermally infeasible, a thermally feasible shape that is aerodynamically suboptimal, a trajectory-optimised design that requires a propulsion system that can't be built within the structural envelope. The sequence determines the outcome more than the optimization does.
Surrogate model dependency: Classical MDO reduces computational cost by replacing high-fidelity simulations with surrogate models trained on a design of experiments. At hypersonic conditions, the physics are highly non-linear; small shape changes produce large, non-monotonic changes in heat flux distribution. Surrogates built on sparse samples of a high-dimensional, non-linear design space miss these features. The optimizer then finds configurations that the surrogate predicts to be optimal but that high-fidelity evaluation reveals to be infeasible or significantly suboptimal.
Local search in high-dimensional spaces: Gradient-based optimisation the standard for shape and trajectory optimization, follows the local gradient toward a local optimum. In the hypersonic MDO problem, with non-linear coupling between disciplines, the local gradient frequently leads toward constraint boundaries rather than toward the globally better solutions that require exploring non-obvious regions of the joint design space.
Computational budget exhaustion: A hypersonic MDO loop using high-fidelity CFD, structural FEA, and trajectory simulation might require 10,000–100,000 function evaluations to converge. At hours per evaluation, this is not feasible within a design program. Classical methods either reduce fidelity to the point where the optimization is solving the wrong problem, or they reduce the number of evaluations to the point where they can't explore the design space adequately.
This is precisely the gap that quantum-inspired quantum optimization addresses not by making individual simulations faster, but by finding near-optimal solutions with fundamentally fewer evaluations through more intelligent exploration of the design space.
Where Quantum-Inspired Optimization Delivers Measurable Advantage
The ROI of quantum optimization in hypersonic vehicle programs comes from three sources: design space coverage, coupling fidelity, and convergence speed.
Design space coverage: Quantum-inspired algorithms use probabilistic, parallel search strategies that evaluate many non-adjacent regions of the design space simultaneously finding configurations that gradient descent misses because they require traversing through locally worse solutions to reach globally better ones. In hypersonic shape optimization, these are precisely the configurations where aerodynamic efficiency and thermal performance improve together with non-obvious geometries that classical methods never evaluate because the local gradient doesn't point toward them.
Multi-objective simultaneous optimisation: Real hypersonic MDO has no single objective. The design must simultaneously minimise TPS mass, maximise L/D ratio, satisfy scramjet inlet operability, maintain structural margins, and meet signature requirements. Quantum-inspired multi-objective optimization maps the true Pareto frontier across these objectives showing engineers the actual trade-off space rather than returning a single solution that has implicitly made those trade-off decisions without engineering visibility.
Surrogate-in-the-loop integration: BQP's platform integrates quantum-inspired search with multi-fidelity surrogate models using low-fidelity evaluations to guide the search and triggering high-fidelity validation at promising configurations identified by the optimizer. This reduces the total number of expensive high-fidelity evaluations required by orders of magnitude compared to gradient-based methods running on the same surrogate infrastructure. BQP's MDO solvers have demonstrated 20× faster convergence than classical methods on aerospace design problems of equivalent complexity.
Trajectory co-design: Quantum-inspired optimisation handles the combined vehicle design and trajectory variable space simultaneously, something classical sequential approaches cannot do. Co-design finds vehicle-trajectory combinations that neither discipline-first design approach reaches: trajectories that reduce peak heat flux enough to justify a lighter TPS, which improves mass fraction, which extends range beyond what the aerodynamically optimised design achieves on the original trajectory.
How BQP Applies to Hypersonic Vehicle Optimization Programs
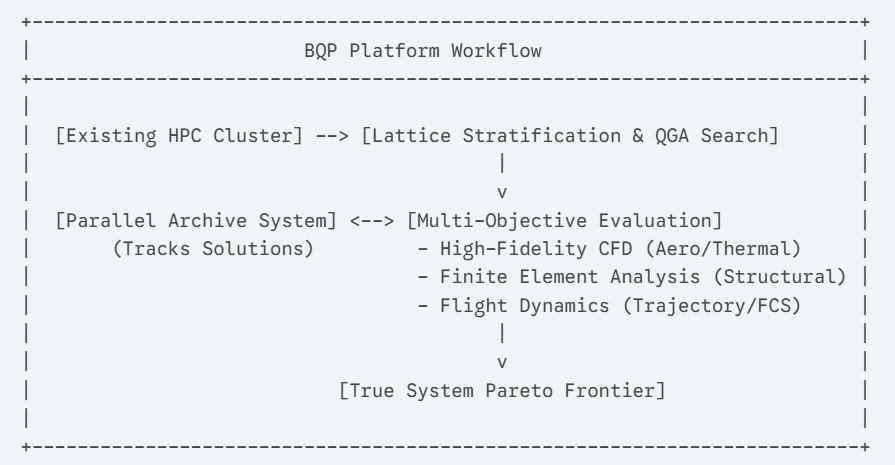
BQP's quantum-inspired simulation and optimization platform addresses the specific computational bottlenecks that limit hypersonic MDO today running on your existing HPC infrastructure and integrating natively with standard aerospace simulation software.
At its core, the platform replaces classical gradient descent with a Quantum-inspired Genetic Algorithm (QGA) designed specifically for multimodal, high-dimensional design spaces. The workflow operates as follows:
The Mechanics: Why QGA Outperforms Classical MDO
1. Quantum Chromosome Encoding and Superposition
In classical genetic algorithms, design parameters wing sweep angle, TPS thickness, control gain are encoded as fixed binary strings. In QGA, parameters are represented by quantum bit (Q-bit) chromosomes. A single Q-bit state is defined as:
∣ψ⟩=α∣0⟩+β∣1⟩|\psi\rangle = \alpha|0\rangle + \beta|1\rangle∣ψ⟩=α∣0⟩+β∣1⟩
where α\alpha α and β\beta β are probability amplitudes across possible states. Because a single quantum chromosome can represent many feature states simultaneously through superposition, the algorithm explores an exponentially larger portion of the design genome at each generation. The chromosome only collapses into a single deterministic configuration at evaluation. This prevents premature convergence and ensures the optimizer does not commit to a region of the design space before the global landscape has been adequately mapped.
2. Uniform Space Stratification via Lattice Rules
Rather than relying on pseudo-random seeding which clusters initial populations in low-dimensional subspaces and leaves high-performing pockets of the design space unsampled, QGA uses lattice rule-based stratification to distribute initial design points uniformly across the full parameter space. In hypersonic MDO, where isolated regions of high aerodynamic efficiency exist far from conventional starting geometries, this ensures those configurations are not systematically skipped.
3. Niching for Parallel Multi-Modal Exploration
The highly non-convex, multimodal nature of hypersonic physics means no single search trajectory finds all viable solutions. QGA addresses this by dividing the chromosome population into distinct sub-groups, or niches, each converging on a different region of the design space in parallel. Multiple viable vehicle configurations spanning different aerodynamic shapes, TPS strategies, or propulsion integration geometries are identified simultaneously rather than sequentially.
4. Parallel Archiving System
Indefinitely scaling population size to capture multiple solutions is computationally infeasible. QGA decouples this problem by separating the live search population from a parallel archive system. The archive monitors all chromosomes in real time, comparing and storing every feasible vehicle configuration discovered during the run without exhausting system memory. The result is a complete map of viable design candidates, not just the single best solution the optimizer happened to converge on last.
5. Adaptive Search Domain Scaling
As each niche approaches a promising configuration, the algorithm dynamically tightens its search boundaries refining solution precision at the local level (for example, tuning specific control surface parameters or engine inlet lip radii) while the remaining niches continue exploring the global design space. Local accuracy and global coverage are maintained simultaneously, not traded against each other.
Where This Delivers Measurable Engineering Advantage
For Aerodynamic Shape Optimization: QGA replaces gradient descent as the outer-loop optimizer, exploring the shape parameter space via probabilistic parallel search to find heat-flux-efficient geometries that escape traditional local traps. Integration with CFD workflows combining high- and low-fidelity aerodynamic data maintains physical accuracy while reducing the high-fidelity evaluation budget required for convergence.
For TPS, Control, and Trajectory Co-Design: Multi-objective QGA simultaneously handles structural mass, trajectory constraints, and flight control parameters across the full flight envelope. The output is a true Pareto frontier of mass-versus-performance trade-offs giving engineering teams direct visibility into the actual design choices available, rather than receiving a single solution with the trade-offs already made implicitly.
Seamless Enterprise Integration: BQP's hybrid quantum-classical solvers plug directly into existing HPC and GPU workflows. You retain your high-fidelity simulation infrastructure, require no specialised quantum hardware, and see operational deployment within weeks of scoping.
Start your free trial to benchmark quantum-inspired MDO against your specific hypersonic design problem.
Conclusion
Hypersonic vehicle optimization is the most demanding multi-disciplinary design problem in aerospace engineering, tight physical constraints, non-linear coupling between disciplines, narrow feasibility corridors, and computational costs that exhaust classical MDO approaches before the design space is adequately explored.
The programs that close the performance gap between what is theoretically achievable at Mach 8+ and what is currently being built will not do so by running more classical optimization iterations. They will do so by exploring the coupled design space more intelligently, finding the non-obvious configurations where aerodynamic efficiency, thermal survivability, propulsion integration, and trajectory performance improve together, rather than trading against each other.
Quantum-inspired optimization makes this achievable today, on existing infrastructure, within design program timelines that classical methods cannot meet.
Frequently Asked Questions
What is hypersonic vehicle optimization?
Hypersonic vehicle optimization is the simultaneous multi-disciplinary design process of finding vehicle configurations shape, structure, thermal protection, propulsion integration, and trajectory that maximise mission performance within the hard physical constraints that govern flight above Mach 5. It is distinguished from conventional aerospace MDO by the non-linear coupling between disciplines that makes sequential discipline optimization insufficient.
Why is hypersonic vehicle design harder to optimize than supersonic design?
Above Mach 5, aerodynamic heating is severe enough that every shape change simultaneously alters aerodynamic performance, structural thermal loading, and propulsion inlet conditions in ways that cannot be decoupled. The airframe and engine are geometrically integrated. TPS mass, trajectory, and propulsion design are all interdependent. Classical MDO methods that handle these disciplines sequentially produce locally optimal, globally suboptimal designs.
What are the most critical constraints in hypersonic vehicle optimization?
Surface heat flux limits governed by TPS material capability, scramjet inlet operability across the flight Mach range, structural aeroelastic deformation limits, dynamic pressure corridor boundaries, and trajectory-integrated thermal load accumulation. Each binds simultaneously across the full flight envelope violation of any single hard constraint is mission failure.
How does quantum-inspired optimization improve hypersonic MDO?
Quantum-inspired search explores the coupled multi-disciplinary design space far more efficiently than gradient-based methods finding configurations in the joint aerodynamic-thermal-structural-trajectory design space that classical local search never evaluates. It handles simultaneous multi-objective optimization across competing design objectives without collapsing them into a single metric, and converges with significantly fewer high-fidelity simulation evaluations directly reducing the computational cost that is the primary bottleneck in hypersonic MDO.
Does BQP require quantum hardware to apply to hypersonic design programs?
No. BQP's quantum-inspired optimization runs on existing HPC and cloud infrastructure. It integrates with CFD, FEA, and trajectory simulation workflows already in use at aerospace programs. No quantum processors, no new hardware investment, and no specialist quantum engineering team is required. Most deployments are operational within weeks of scoping.
What results has quantum-inspired MDO demonstrated on aerospace design problems?
BQP's platform has demonstrated 20× faster convergence than classical MDO methods on aerospace design problems of equivalent complexity. A satellite constellation design program reduced design cycle time from 18 months to 6 weeks with 23% improvement in mission performance driven by the optimizer's discovery of non-intuitive configurations that only emerged through true simultaneous multi-disciplinary optimization. Start a free trial to scope results for your specific hypersonic program.
.png)
.png)
.jpeg)


.svg)
.svg)
.svg)
.svg)